上一篇我們聊到,這次透過 Turo 租了 2026 全新 Model Y,在美國實測 FSD V14 後,最強烈的感受是它真的已經很會開。從舊金山前往優勝美地、太浩湖,再一路回到灣區與南加州,FSD V14 在高速公路、城市道路與山路中的表現,都已經相當接近真正的「旅程代駕」。
本文主要內容
但越是接近無人監督,最後那一小段差距就越值得仔細看。因為真正卡住 FSD 的,往往不是一般道路上的跟車、轉向或變換車道,而是施工管制、惡劣天氣、圖資錯誤、私人停車場、人類互動、機場接送與臨時停靠這些「現實世界不照規則來」的狀況。也就是說,FSD 距離無人監督真正難的地方,往往不是前面 99.9%,而是最後那 0.1%。
FSD 已經很會開,但無人監督難在例外情境
如果只看一般道路行駛,FSD V14 的進步已經非常明顯。它能穩定跟車、轉彎、變換車道、處理 STOP SIGN,也能在山路中維持相當高的穩定性與舒適度。對長途旅行來說,這已經足以大幅降低駕駛疲勞。
但無人監督自駕的標準不是「大部分時間都能開」,而是車上沒有駕駛可以接手時,系統要怎麼處理那些不完美、不標準、不在地圖上的狀況。

這趟美西自駕讓我們更清楚看到,FSD V14 的挑戰可以大致分成幾類:臨時施工與手勢管制、雨雪與能見度問題、鏡頭髒污與硬體維護、目的地停車與專用車格、私人停車場圖資、取票口與人工售票互動,以及未來 Cybercab 或無方向盤車型如何讓乘客手動微調。
這些都不是單純「會不會開車」的問題,而是「能不能理解現實世界正在發生什麼」。

臨時道路狀況:看得懂指令,不一定懂整段情境
FSD V14 對道路標線、號誌、STOP SIGN 與一般車流判斷已經相當成熟,但真實道路並不總是照著標準規則運作。施工路段、封閉道路、臨時交通錐、人員手勢與現場管制,往往才是最考驗自駕系統的地方。
施工路段:看得懂 STOP,也未必知道管制何時結束
這次前往優勝美地途中,我們遇到一段施工路段,現場採用「單線雙向機動管制」。這種場景在山區或郊區道路很常見,施工人員會在一端手持 STOP 牌,讓一個方向的車流停下,等對向車輛通過後,再用手勢放行。
FSD 在這個場景的前半段表現其實相當好。施工人員手拿 STOP 牌時,FSD 可以正確識別並停車;當施工人員開放通行時,FSD 也能識別手勢,並正確駛入施工中僅開放的對向車道。

這代表 FSD 並不是看不懂施工人員,也不是不能處理臨時指揮。它已經可以理解「有人叫我停」、「有人讓我走」這類明確訊號。
真正的難點出現在通過施工路段之後。當時順向車道仍擺放著相距較遠的交通錐,FSD 便判斷可以駛回順向車道,但問題是順向車道末端仍然有施工,單線雙向路段其實還沒有結束。

FSD 已經能處理單一指令,但要理解一整段臨時交通管制的開始、延續與結束,仍然是更高一層的判斷。不是每個規則都畫在車道線上,也不是每個現場狀況都有清楚的地圖資料。
圖資錯誤:導航知道路,但不一定知道門關了
圖資問題同樣是 FSD 無人監督化必須面對的挑戰。
例如 Motel 6 Monterey 旅館,FSD 可能因為圖資關係導航到後門出口。問題是,該後門出口在夜間已經關閉,但系統仍可能依照導航資料前往該出口。

這種情境對人類來說很好處理,看到門關起來,就改走別的出口。但對自駕系統來說,它需要先辨識「這條路不可通行」,接著理解「這不是暫時障礙,而是目前無法使用的出口」,再重新規劃路線。
同樣在 Spooner Lake Visitor Center,FSD 抵達時停在入口收費處,但收費處沒人。車輛等待一段時間後,自動倒車,改往下一個導航點,並沒有進入停車區。離開時遇到封閉道路,FSD 則能繞開並轉一圈後重新找到正確出口。

這些案例代表 FSD 已經有一定的重新規劃能力,但圖資與現場狀態不一致時,仍然會帶來很多不確定性。
天氣與視覺限制:不是軟體進步就能完全解決
很多人討論 FSD 時,會把重點放在軟體版本、模型能力與決策邏輯,但自駕車要真正進入無人監督階段,天氣與硬體狀態同樣重要。因為再好的 AI,也需要看得清楚、判斷得穩定,才有辦法持續自駕。
惡劣天氣:FSD 會降級,也可能要求駕駛接管
這次行程中,優勝美地剛好遇到一場強大的春季風暴,當時甚至發布了冬季風暴警報。雨雪天氣下,FSD 的表現就會變得更保守。
在雨雪、濃霧或能見度不佳的環境中,FSD 的速度上限會降低,車機也會顯示「FSD 全自動輔助駕駛(受駕駛監督)可能已降級,偵測到惡劣天氣」。這時候 FSD 仍然可能繼續行駛,但速度會明顯比一般天氣更保守,有時甚至略低於一些比較勇敢的人類駕駛。

如果能見度低於一定程度,系統也會跳出紅色方向盤,要求駕駛接管。這是目前 FSD 仍然存在的明確邊界:當系統判斷自己無法穩定掌握環境,就會交出主控權,退出自駕功能。
比較特別的是,FSD 和傳統 Autopilot 的接管邏輯不完全一樣。在一些一般路況中,即使系統短暫跳出紅色方向盤、要求駕駛接管,FSD 仍可能在 1 秒內重新掌握狀況,接著繼續執行自駕。這和一般 Autopilot 一旦跳出接管警示、自駕功能就完全停止的體驗不太一樣。

這代表 FSD 的異常處理更動態,也更像是在嘗試自我恢復。但對無人監督來說,只要仍然存在「需要人類接手」的情況,這就是必須被解決的核心問題。
視覺受影響:車會自己揉眼睛,但鏡頭髒污仍是硬傷
這次租到的 Model Y,前鏡頭區域內部疑似有髒污。平常開起來不一定有明顯影響,但遇到逆光時,就會出現更頻繁的注意力監控提示,車機也曾顯示「自動輔助駕駛期間偵測到鏡頭能見度不佳。請透過 Tesla 應用程式安排清潔服務。」
有趣的是,目前 FSD 在前方視覺受影響時,會自動噴灑雨刷水,並快速刷動攝影機區域。從車內看起來,真的很像車子在自己「揉眼睛」。這趟旅程中,這個動作出現得相當頻繁,推測也和前方玻璃內部髒污有關。

但問題是,這類髒污不是駕駛在路邊擦外側玻璃就能解決,而是需要清潔前鏡頭區域車內玻璃。對一般租車使用者來說,這幾乎無法自行處理;對未來 Robotaxi、Cybercab 或大規模無人車隊來說,這也代表自駕可靠度不只取決於 AI 模型與軟體版本,車輛硬體維護品質同樣會變成關鍵。
一台車能不能自駕,不只是看它有沒有最新 FSD,也要看鏡頭、玻璃、感測器與整車維護是否保持在良好狀態。當車隊規模變大,這件事可能會比一般人想像中更重要。
停車場才是真實世界最難的一關
如果說道路行駛是 FSD V14 已經明顯進步的地方,那停車場就是它仍然最容易遇到現實世界細節的地方。
停車場看起來速度低、風險低,但其實充滿不規則動線、模糊標線、臨時標誌、行人、推車、專用車格、不同入口與出口。對人類來說,這些很多時候只是「看現場感覺」;但對自駕系統來說,每一個都可能是判斷題。
停車場離場:能啟動,不代表路線最佳
FSD 現在幾乎在所有地點都能直接啟動,包含賣場停車格內。這代表它已經不只是道路上的輔助駕駛,而是能從停車場開始接手,嘗試自己找路離開。
但能啟動,不代表離場路線一定最佳。實際使用下來,FSD 離開停車場時有時會繞一大圈。這可能和圖資有關,也可能代表特斯拉仍需要長時間累積各地場域資料,替不同停車場建立更完整的路線檔案。
換句話說,在特斯拉數量多、資料累積多的大城市,體驗可能會比較好;但在特斯拉數量少的地區,停車場內的表現可能就不一定穩定。
專用車格:會避開身障車位,但可能停進 Curbside Pickup
停車位判斷也是另一個細節。FSD 目前已經知道不該占用身障車位,這點很重要。不過北美許多速食餐廳都設有 Curbside Pickup 或 Mobile Order 專用車格,讓使用者透過 App 點餐後,把車停在指定車位,再由服務員將餐點送到車上。

這類車格不是身障車位,但也不是一般停車格。而目前 FSD 仍有一定機率會停進這些專用車位。
無人監督要處理的,不只是「有沒有格子」,而是「這個格子是不是適合現在這台車停」。
自動停車:停得進去,不代表乘客好下車
這次也觀察到另一個很細的停車問題:車子停得進去,不代表乘客一定好下車。
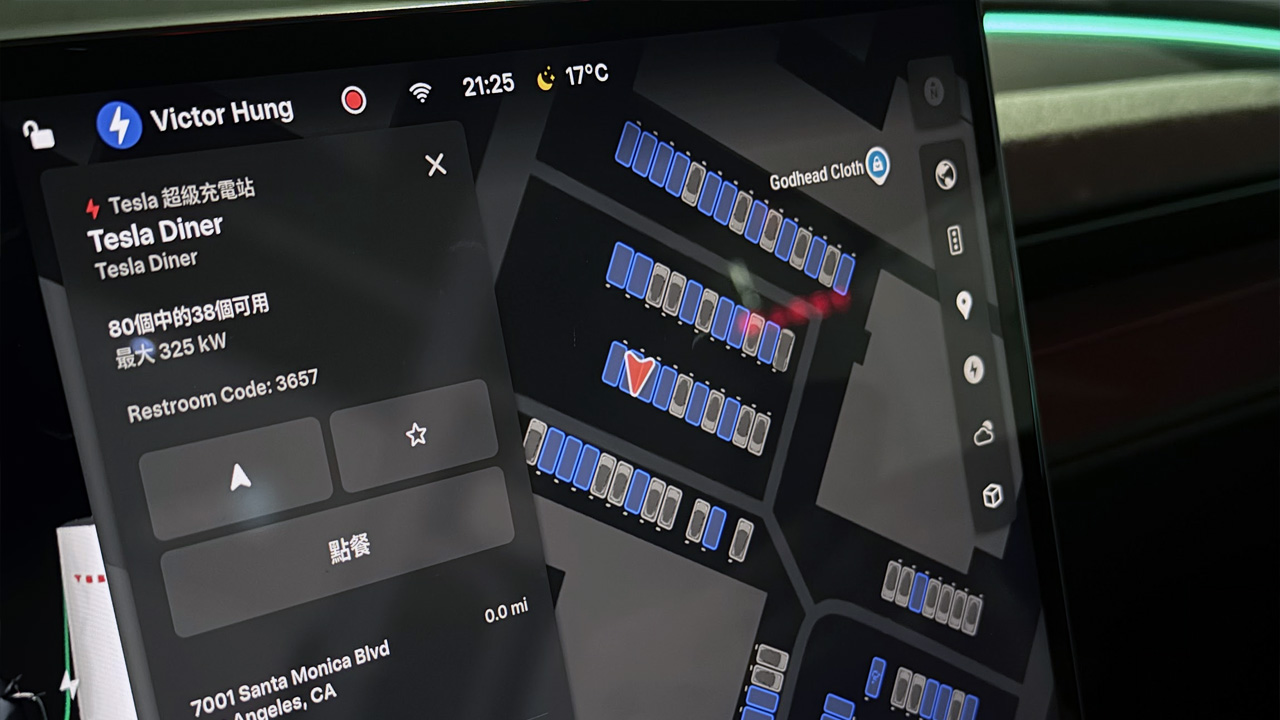
例如部分 V4 超級充電站的停車布局,可能會讓 FSD 自動停車後,後座乘客沒有足夠空間下車。從車輛角度看,它可能停得正確,甚至也能順利插槍充電;但從乘客角度看,旁邊空間太窄,實際上下車並不方便。

路邊停車也可能出現類似情況。車輛停得合法、位置看似正確,但如果沒有考量後座乘客、行李、路邊障礙物或上下車動線,體驗仍然不理想。
這是 FSD 從「把車停好」走向「把人送好」之間的差距。真正的無人監督自駕,不只要知道哪裡可以停,也要知道人要怎麼上下車、乘客有沒有空間開門、行李能不能拿出來。
Apple Visitor Center:最後停對了,但過程浪費時間
Apple Visitor Center 停車場也是一個很有代表性的案例。
當時 FSD 沒有從正門入口進入停車場,而是繞了半圈到後側入口。停車場內其實有很多車位,但 FSD 仍然持續往內探索,最後停在靠近正門入口的車位。

嚴格來說,最後停的位置是合理的,甚至還算方便。但整個過程浪費了時間。對人類駕駛來說,可能一進停車場看到前方有空位就停了;但 FSD 似乎仍在尋找它認為更適合的車位或路徑。
這種案例很適合用來理解目前 FSD 的停車邏輯:它不是不能停,而是有時不一定用最有效率、最符合人類直覺的方式完成停車。
私人停車場:到得了地址,不一定找得到入口
在洛杉磯 Airbnb 的場景也很典型。該地址雖然有停車場,但 FSD 導航到地址後,並不知道停車場入口在哪裡,因此只會在路邊停靠。
這可能是因為私人停車場的入口沒有被記錄在 FSD 圖資中。對人類來說,到了地址附近可以觀察招牌、閘門、車道出入口,再自己判斷要從哪裡進去;但對 FSD 來說,如果圖資沒有足夠資訊,它可能只知道「目的地到了」,卻不知道「車應該從哪裡進去」。

更有趣的是,如果在該停車場地下開啟 FSD,系統判斷環境後似乎會先往右前方行駛,但前方其實是死路,出口位於左側。
這也讓我們想到,未來 FSD 個人化可能會變得很重要。它是否能記住使用者常去的停車場入口?是否能記錄進出動線?甚至能不能指定固定車格?對一般住家、公司、飯店、Airbnb 或私人停車場來說,這些都會影響無人監督自駕的實用性。
人類互動場景:FSD 還不懂流程何時結束
除了停車場,另一個很關鍵的難題,是 FSD 對人類互動流程的理解還不夠完整。
車子知道要停,知道柵欄升起後要走,知道前方車流開始移動後要跟上,但它不一定知道「票拿到了沒」、「護照還回來了沒」、「找錢結束了沒」、「乘客是不是真的準備好下車」。

這些對人類來說很自然,對自駕系統卻是很難的社會判斷。
取票口、售票口與得來速
FSD 對「車輛應該停下來」的理解已經不差,但對「人與人之間的互動是否完成」仍然不夠完整。
例如多數停車場即使有車牌辨識,仍需要在入口取票。FSD 目前會知道要在取票口停車,也會在柵欄升起後自動再開。但問題是,停車距離取票機可能太遠,駕駛手可能搆不到,這時候就需要手動接管,讓車更靠近取票機。

國家公園人工售票口也有類似情況。FSD 可以正確停車,但付款完成後,如果對方還沒有遞回證件或護照,車輛可能就準備自動開走。
這是目前 FSD 很重要的邊界:它能理解道路與車輛動作,但還不完全理解人類互動的流程。
臨停與手動微調:Cybercab 未來要怎麼聽懂乘客需求
在自駕旅行過程中,很多時候我們需要臨時停靠路邊,甚至有些情況會稍微偏離道路。例如國家公園路側暫停、風景點臨停、拍照點下車,或只是想讓乘客先下車再找停車位。
這些情境目前勢必需要駕駛接手,手動停靠。

但如果未來 Cybercab 或更多無人監督自駕車型真的販售給一般消費者,問題就會變得很有趣:乘客要怎麼告訴車子「靠右一點」、「往前 10 公尺」、「停在那個空位」、「不要停這裡」、「我想在這裡下車」?
這些需求可能透過 App、語音、車內螢幕、地圖拖曳,甚至遠端人工協助來完成。但不管是哪種方式,無人監督自駕都不能只會照導航開,它還需要理解乘客臨時改變心意、現場狀況不如預期,以及目的地不是一個點,而是一段可被調整的空間。
召喚功能:不是車不會動,而是距離限制讓它斷線
召喚功能也是這趟旅程中很有趣的一個案例。美國現行車主必須位於車輛方圓約 65 公尺,也就是 213 英尺範圍內,才能啟動並維持召喚功能。
這次在 Walmart 停車場,我們的位置剛好在 65 公尺範圍邊緣。從手機畫面來看,車輛仍在藍色圓圈內,理論上還在最大可操作距離內。

但問題是,當 FSD 遵守停車場地面標線,選擇順向移動再繞回來時,車輛反而越開越遠,直接超出 65 公尺範圍,導致召喚中斷。
召喚中斷後使用者就無法繼續控制車輛,只能走近車子。最尷尬的是,當我們走近車輛重新開始召喚後,車輛又再次依照停車場順向動線往外繞,結果再一次把自己開出 65 公尺範圍。它不是不會開過來,而是太遵守停車場動線,反而把自己帶離召喚範圍。

即使命名為「Actual Smart Summon」,也就是「真正的智慧召喚」,實際使用上仍然很依賴手機 GPS、圖資、停車場動線判斷與網路連線。使用者也必須全程按住 Tesla App 操作、監控車輛與周遭環境,並承擔操作責任。換句話說,它不是車子真的能自己來找你,而是車輛在使用者持續監督下,嘗試從停車位移動到指定位置。
這也讓 Actual Smart Summon 距離真正的無人監督還有一段距離。它可以在停車場中移動,也能在某些情境下繞過障礙物,但只要遇到 GPS 邊界、停車場動線、圖資判斷或網路連線不穩,就很容易被現實世界卡住。更不用說 Elon Musk 先前提過的「Banish」功能,也就是乘客下車後讓車輛自行去找車位停好,至今仍沒有真正成為一般車主可用的成熟功能。
機場接送:Robotaxi 與 Waymo 都還在避開最混亂場景
如果要討論無人監督自駕,機場接送一定是重要場景。因為機場不是單純開到目的地,而是要處理上下客、行李、臨停、路邊車潮、旅客穿越與大量併排停車。
目前 Robotaxi 仍未開放機場接送,而 Waymo 在機場場景也相對保守。近期美西太太上傳的影片也提到,Waymo 在機場附近會設定專屬上下車地點,可能避開一般航廈接送區。

這樣做的好處是場域更可控、停靠空間更寬敞,但可以預期,步行距離也會比一般車輛直接接送更遠。
其實在 SFO,我們也觀察到機場已經設有 Ride App Pickup 區域,也就是 Uber、Lyft 等共乘叫車服務的專屬上下車區。實際叫車時,App 會提供路線引導,帶乘客走到指定上車點;現場也有類似月台編號的分區概念,讓車輛與乘客更容易對應。

這或許也提供了未來自駕車接送的一種可能方向。當自駕車普及後,機場未必會讓每輛車都直接擠進現有航廈接送區,而是可能像現在 rideshare 一樣,劃出有編號、有動線、有管理規則的專屬自駕車上下客區域。這樣乘客可能要多走一段路,但對無人駕駛來說,會是更可控、也更現實的落地方式。
如果以桃園機場為例,錯過接送區後重新繞一圈,可能就要多花 10–15 分鐘。這類場景真正困難的地方,不是車子知不知道怎麼開到機場,而是到了機場之後,該怎麼停、停多久、能不能臨停、乘客在哪裡、行李在哪裡,這些才是無人監督必須解決的問題。
最後 0.1%,其實是現實世界的複雜度
這趟美西自駕後,我們對 FSD V14 的看法其實更正面,但也更清楚看到它距離無人監督還差在哪裡。
FSD V14 已經很會開車。它能處理絕大多數長途道路、山路、城市道路與充電站場景,也能在很多情況下比人類更早偵測行人、自行車、減速丘與緊急車輛。對一般駕駛來說,它已經能大幅降低長途旅行疲勞。

但無人監督的門檻不只是在 99.9% 的正常路況中表現良好,而是要在最後 0.1% 的例外場景中,也能做出足夠安全、足夠合理、足夠像人類理解現場的判斷。
施工臨時管制、惡劣天氣、鏡頭髒污、私人停車場、取票機距離、人工售票互動、專用車格、機場接送、路邊臨停與乘客微調,這些看似瑣碎的小事,才是真正決定無人監督能不能自然融入日常生活的關鍵。
FSD V14 已經讓我們看到無人監督自駕的輪廓,但最後那 0.1%,不是單純再多訓練一點路線就能解決,而是要讓車更懂真實世界裡那些不完美、不標準、甚至有點混亂的人類規則。
延伸閱讀
美西實測 FSD V14:Turo 租 Model Y 挑戰優勝美地、太浩湖山路全自駕
舊金山 Robotaxi 初體驗:美國旅遊不自駕,價格比 Uber 便宜一半?
台灣首例!開源專案成功破解啟用 FSD:市區自動轉向變道實測全紀錄
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY 與 Facebook 粉絲專頁,或將 electrify.tw 加入 Google 偏好來源,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。