特斯拉正式推出最新版本自動駕駛軟體 FSD(Supervised)V14.1,整合 Robotaxi 測試版核心技術,並新增「抵達選項」功能,讓車輛能依環境自動判斷停靠方式。此次更新同時強化緊急車輛辨識、道路繞行與整體穩定度,被視為邁向 Robotaxi 商業化的重要一步。
本文主要內容
根據官方更新說明,FSD(Supervised)V14.1 在行車判斷、速度控制與操作介面上皆有顯著升級。除優化都市路口判斷與行人避讓外,還新增前鏡頭自動清潔與髒污警示功能,確保感測器維持最佳狀態。雖仍為監督模式,需駕駛保持注意並隨時接管,但整體行為邏輯已貼近完全自動駕駛水準。
抵達選項全面導入模擬 Robotaxi 停靠行為
FSD V14.1 最大亮點之一是新增「抵達選項(Arrival Options)」功能,讓自動駕駛的停靠邏輯更接近 Robotaxi。駕駛可在導航時預先選擇停車場(Parking Lot)、路邊(Street)、私人車道(Driveway)、立體停車場(Parking Garage)或臨停區(Curbside)等停靠方式,FSD 會依據環境自動判斷最安全、最便利的地點完成停車。
根據網友實測,FSD V14 已展現更高層次的場景理解能力。有車主分享,FSD 在立體停車場內能自動尋找出口,抵達閘門後會主動暫停,待駕駛完成付款並確認柵欄開啟後再繼續前行。
另有實測影片顯示,FSD V14 在餐廳得來速(Drive-Thru)路線中可全程自動運行,能正確辨識點餐與取餐位置,並於適當時機停車與前進,無須駕駛介入操作。這些行為顯示 FSD 的情境判斷邏輯已接近實際 Robotaxi 運作模式。
樹懶模式登場速度檔案更貼近人類駕駛
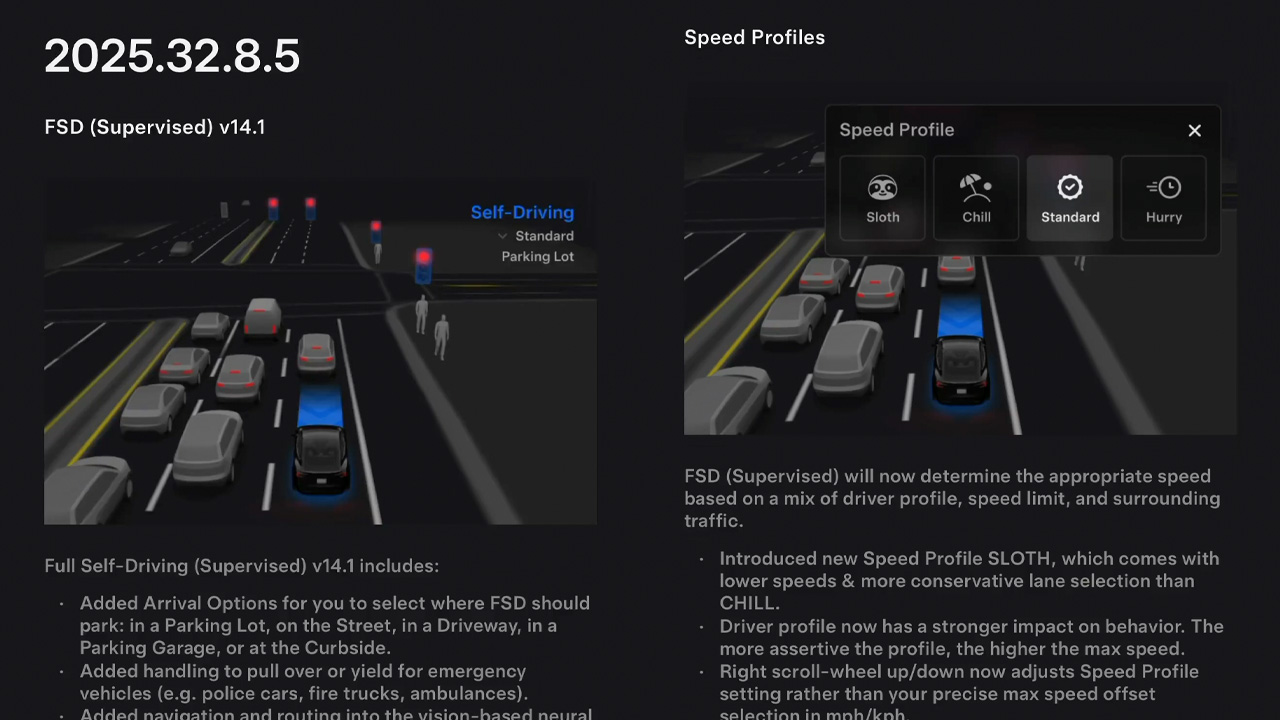
FSD V14.1 對速度控制邏輯進行全面升級,導入全新「樹懶(Sloth)」速度檔案,取代以往僅能微調速限偏移的設計。這一模式比「Chill」更保守,專為密集車流與行人環境設計,FSD 會根據駕駛設定、道路速限與周遭車況,自動調整合理行駛速度,駕駛也可直接透過滾輪切換不同速度檔案。

此外,特斯拉在此次更新中引入 十倍參數規模的強化模型,使 FSD 能更細膩地感知與判斷周圍環境,根據交通動態調整加減速反應,展現更接近人類駕駛的行為邏輯。不同駕駛風格設定(Driver Profile)之間的差異更加明顯,從「樹懶(Sloth)」到「Hurry(迅速)」的駕駛風格,在車距控制與變換車道頻率上都有明確差別,讓駕駛能依個人偏好打造專屬的 FSD 體驗。
強化緊急應變與動態繞行行車判斷更自然
FSD V14.1 在核心行車決策上進行重大升級,導入多項與 Robotaxi 技術接軌的功能,讓自動駕駛在真實道路中的判斷與反應更貼近人類駕駛邏輯。主要改進包括:
- 緊急車輛避讓(Emergency Vehicle Handling):可自動偵測警車、消防車與救護車,主動減速並讓行。
- 動態導航(Vision-based Routing):導航系統與視覺神經網路整合,能即時因應封路、事故或施工重新規劃路線。
- 閘門處理(Gate Handling):強化對靜態與動態閘門的辨識,優化等待與通行判斷。
- 道路障礙物避讓(Road Debris Offset):新增對輪胎、樹枝、落物等障礙物的主動偏移策略。
- 特殊場景識別(School Bus / Unprotected Turns):提升對校車停靠、無保護左轉與車道切入情境的反應精準度。
此外,FSD 在底層架構上強化「故障復原(Fault Recovery)」機制,當感測器或模組短暫失效時,能自動穩定恢復運作,避免突發減速或偏移。根據特斯拉最新安全報告,啟用 FSD 的車輛平均事故間距約為人類駕駛的 2 至 3 倍,顯示新版 FSD 的穩定性已接近量產級 Robotaxi 水準。

鏡頭自動清潔升級操作介面更直覺便利
新版 FSD 導入「窄角鏡頭快速清潔(Narrow Field Washing)」功能,可自動噴灑清潔液清除鏡頭污漬,並在高速行駛時調整清洗過程,利用氣流提升清潔效率與鏡頭乾燥速度,確保在各種天候與環境下維持清晰視野。這項機制針對 FSD 關鍵的窄角前鏡頭設計,能在灰塵、雨滴或昆蟲殘留等情況下自動啟動清洗程序,確保 AI 感測輸入穩定且精準。若 FSD 偵測到擋風玻璃內側有霧氣或殘留物影響視野,則會主動提示駕駛前往服務中心進行人工清潔,避免影響自駕判斷精度。

同時,操作介面(UI)也全面升級。駕駛可在中控螢幕上直接啟用 FSD,無論在行駛或停車(Park)狀態下皆可一鍵啟動。Autopilot 視覺化畫面支援即時調整速度檔案(Speed Profile)與抵達選項(Arrival Options),無需進入多層選單,讓整體操作更直覺流暢,使用體驗更貼近 Robotaxi 等級的自駕系統。
官方更新項目彙整完整列出主要改進
| 功能項目 | 更新內容 |
|---|---|
| 抵達選項(Arrival Options) | 可選停車場、路邊、車道、停車塔或臨停區,並針對每個目的地自動記錄偏好 |
| 緊急車輛辨識(Emergency Handling) | 自動識別並避讓警車、消防車與救護車 |
| 動態導航(Dynamic Routing) | 將導航整合至視覺神經網路,可即時繞行施工與封路路段 |
| 速度檔案(Speed Profiles) | 新增樹懶模式(SLOTH)與強化模型,駕駛風格影響更明顯 |
| 閘門與障礙物(Gate & Debris) | 提升閘門、障礙物與臨時物體的偵測與避讓準確度 |
| 行為決策(Driving Scenarios) | 強化無保護左轉、學區巴士與車道切入等複雜場景處理能力 |
| 系統穩定度(Fault Recovery) | 提升模組故障偵測與自動復原能力,降低突發減速與偏移 |
| 鏡頭清潔(Camera Cleaning) | 新增自動鏡頭清潔與氣流加速乾燥機制,並提供髒污提示功能 |
| 操作介面(UI Improvements) | 可於中控螢幕直接啟用或調整自駕設定,操作更直覺流暢 |
舊版 HW3 車輛暫未列入 V14 升級範圍
本次更新優先針對配備 HW4 硬體的車款推送,涵蓋新款 Model S、Model X、Model Y 與 Cybertruck。舊版 HW3 車輛暫未列入升級範圍。特斯拉表示,後續將逐步擴大支援車型,並針對不同硬體版本重新調校神經網路參數,以確保處理效能與感測準確度維持在最佳水準。
目前 FSD(Supervised)V14.1 僅在美國部分地區釋出,主要集中於德州奧斯汀與舊金山灣區進行內部測試,累積超過 1,500 次行程與約 24,000 公里駕駛紀錄。雖然該版本的自駕行為邏輯已高度接近 Robotaxi 運作模式,但仍要求駕駛全程監督、隨時可介入操作。
下階段更新將將強化感知能力與駕駛邏輯
特斯拉已預告下一階段的 FSD 更新,將持續提升行駛平順度與「感知能力(Sentience)」,並加強停車格辨識與自動停車品質。Elon Musk 於 X 發文指出,FSD(Supervised)V14.1 已進入廣泛推送階段,接下來 V14.2 將於數週內發布,V14.3 則會在完成安全測試後陸續推出。他強調,此次系列更新幅度龐大,團隊正逐項驗證功能,以確保穩定性與安全性。
特斯拉自動駕駛部門負責人 Ashok Elluswamy 亦證實,V14 系列是新架構下的首個完整版本,並透露接下來將有多次重大更新於年底前陸續推出。他同時確認,Cybertruck 將全面支援 FSD V14 功能,包含自動倒車與自動停車能力。工程師 Phil Duan 也補充說明,V14 將駕駛邏輯從「設定速度」轉為「駕駛風格」導向,駕駛只需輸入目的地並選擇模式(如 Chill、Standard、Hurry),FSD 即會自動調整速度與距離,讓駕駛行為更接近人類自然反應。
延伸閱讀
特斯拉 FSD 完成 1.3 萬公里環澳!美國網紅跨洲挑戰百公里就出事
特斯拉 FSD 登陸澳洲與紐西蘭!左駕重訓版本 HW4 車款率先開放
特斯拉發表高精度佔用網路專利!純視覺 AI 強化 FSD 環境建模與
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY、Google 新聞 與 Facebook 粉絲專頁,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。