特斯拉近期在奧斯汀與舊金山街頭,加快部署專為 Robotaxi 營運打造的 Model Y 改裝車。這套被稱為 Project Halo 的硬體平台,針對純視覺(Vision-only)架構進行補強,讓車輛在泥濘、雨水或低溫環境下,仍能維持穩定的環境辨識表現。相關設計也引發外界關注,未來是否會逐步下放至市售車型。
車側與後方鏡頭開始導入清洗設計
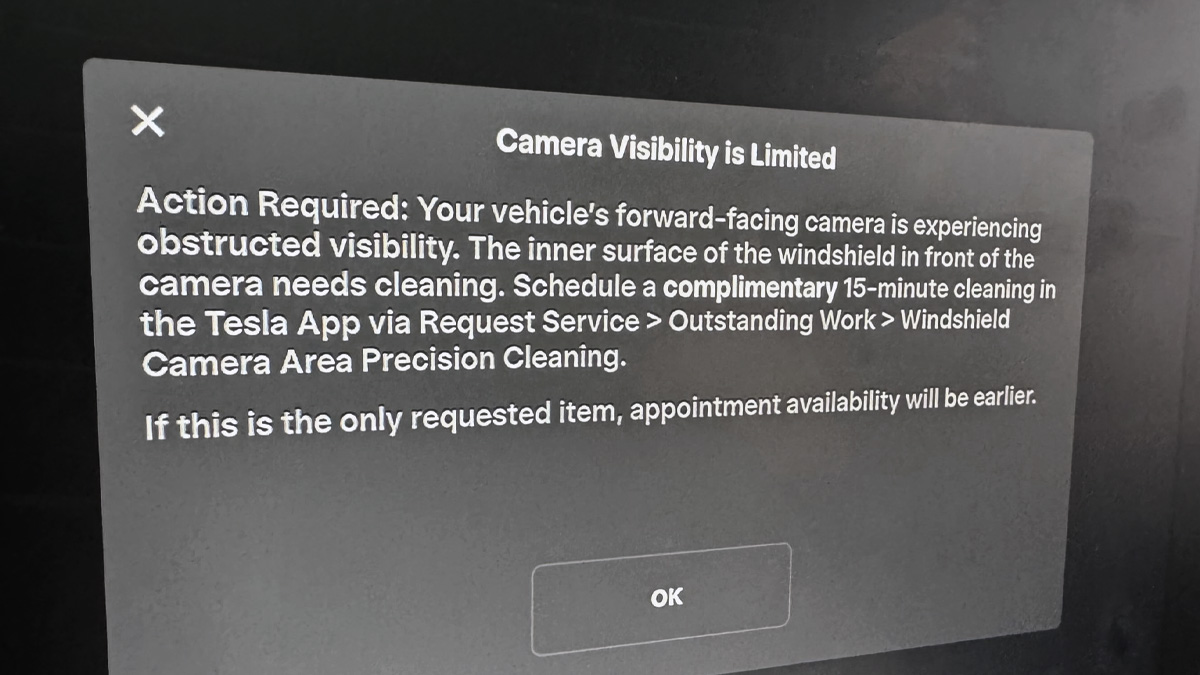
從目前曝光的 Robotaxi 改裝車來看,Project Halo 已為車側攝影機(位於葉子板)與後方鏡頭加裝清洗裝置。這些鏡頭在變換車道、轉彎與倒車時扮演關鍵角色,一旦視線受阻,系統判斷能力就會明顯下降。

清洗方式以高壓噴洗搭配車輛行進時的導流設計為主,能在不額外增加複雜結構的情況下,快速帶走鏡頭表面的水漬與髒污。相較之下,目前市售特斯拉車型多半僅有前方攝影機具備清洗功能,部分車款另支援後方鏡頭噴洗,車側鏡頭仍未納入量產配置。
奧斯汀實際營運:無人監督下的路況考驗
2026 年 1 月中旬,特斯拉在奧斯汀正式展開 Robotaxi 的無人監督公開乘車服務,一般乘客已可搭乘完全無安全人員的車輛。這批改裝車在冬季常見的積水、灰塵與低溫條件下,鏡頭仍能維持清晰視野,清洗系統成為支撐長時間營運的重要配角。

在過渡階段,仍有少數車輛搭配隨行監控作為備援,但這種配置正逐步退場,營運模式已朝向完全無人化運作。
市售車暫未跟進,未來是否下放仍待觀察
截至目前,Project Halo 仍屬於 Robotaxi 專屬的硬體配置。市售車款在鏡頭清洗方面,仍以前方攝影機為主,尚未看到車側或多鏡頭清洗系統的量產跡象。
不過,隨著無人車營運經驗累積,部分清洗與維護邏輯已逐漸反映在軟體層面。未來若新世代車型在設計初期就預留對應硬體,側邊或後方鏡頭導入清洗功能並非不可能,但短期內仍以營運車隊優先。
Project Halo 與現行硬體平台的關係
目前投入 Robotaxi 營運的車輛,仍以 AI4(HW4)硬體為基礎,Project Halo 屬於額外加裝的硬體與控制模組,而非綁定某一代 AI 平台。外界關注的 AI5(HW5)仍在後續規劃階段,短時間內不會直接影響這套清洗系統的部署。

從定位來看,Project Halo 更像是為無人車長時間上路所準備的一組實務型補強方案,目標是在沒有人工介入的前提下,盡量降低鏡頭視線受阻對系統造成的影響,也為未來是否下放至市售車型提供實際參考依據。
延伸閱讀
特斯拉將移除超音波感測器,全面採用 Tesla Vision 純視覺系統
馬斯克再批 LiDAR 不安全!特斯拉堅守純視覺技術自駕方案
從 Face ID 到自駕車!特斯拉 Cybercab 傳導入結構光強化邊緣場景辨識
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY 與 Facebook 粉絲專頁,或將 electrify.tw 加入 Google 偏好來源,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。