YouTuber 兼工程師 Mark Rober 近日進行了一系列測試,比較特斯拉 Autopilot 系統與搭載 LiDAR(光達)技術的車輛在濃霧、大雨及視覺錯覺場景下的表現,並打造了一座模仿經典卡通《樂一通》中 Wile E. Coyote(威利狼)遭 Road Runner(嗶嗶鳥)欺騙的假牆場景,以檢驗兩種技術路線的極限。
本文主要內容
這支標題為 「Can You Fool a Self-Driving Car?」 的影片在 24 小時內獲得超過 900 萬次觀看。然而,影片中 Luminar 公司的曝光度相當高,包括員工身穿 Luminar 襯衫、車輛貼有公司標誌,甚至一度被上傳至 Luminar 官方網站。
此外,某項測試的原始片段顯示 Autopilot 在撞擊前 17 幀即已退出,因此不少網友質疑測試不公平,認為這可能損害特斯拉技術的聲譽。更有輿論指出,影片未披露與 Luminar 的潛在合作關係,涉嫌誤導觀眾。

純視覺 vs. LiDAR:自動駕駛技術的兩大陣營
目前,自動駕駛技術的發展主要圍繞兩大核心路線:一是特斯拉推崇的純視覺方案(Vision-Only Approach),另一是以 Waymo、Cruise 為代表的多感測器融合技術(Sensor Fusion Approach),其中 LiDAR 扮演關鍵角色。
特斯拉的純視覺方案
特斯拉選擇不依賴 LiDAR 或雷達,而是透過攝影機與 AI 技術實現自動駕駛。其核心理念是模仿人類駕駛方式,認為視覺系統結合深度學習即可提供足夠的環境感知能力。
技術特點
- 核心硬體: 依賴高解析度攝影機(通常為 8 顆或更多),不使用 LiDAR 或雷達。
- 核心技術: 透過神經網路(如 FSD 晶片與 Dojo 超級電腦)處理攝影機捕捉的影像,進行物體識別、車道規劃與決策。
- 數據驅動: 特斯拉利用其龐大的車隊數據,透過 OTA(空中軟體更新)持續優化演算法,以提升系統表現。
優勢
✅ 成本較低: 不使用昂貴的 LiDAR 和雷達,降低硬體成本,適合大規模量產。
✅ 類似人類駕駛: 視覺方案模仿人類眼睛,理論上能適應複雜環境與不同路況。
✅ 持續進化: 依靠大數據與 AI 訓練,系統可透過軟體更新不斷提升性能。
挑戰
⚠ 感測侷限: 在低光、惡劣天氣(大霧、大雨、強光)等環境下,攝影機可能無法提供穩定的感知能力。
⚠ 數據依賴: 需要大量高品質標註數據來訓練 AI,數據的多樣性與準確性直接影響系統表現。
⚠ 安全爭議: 缺乏感測器冗餘,若單一攝影機故障或誤判,可能影響駕駛安全。

多感測器融合技術(以 Waymo 為代表)
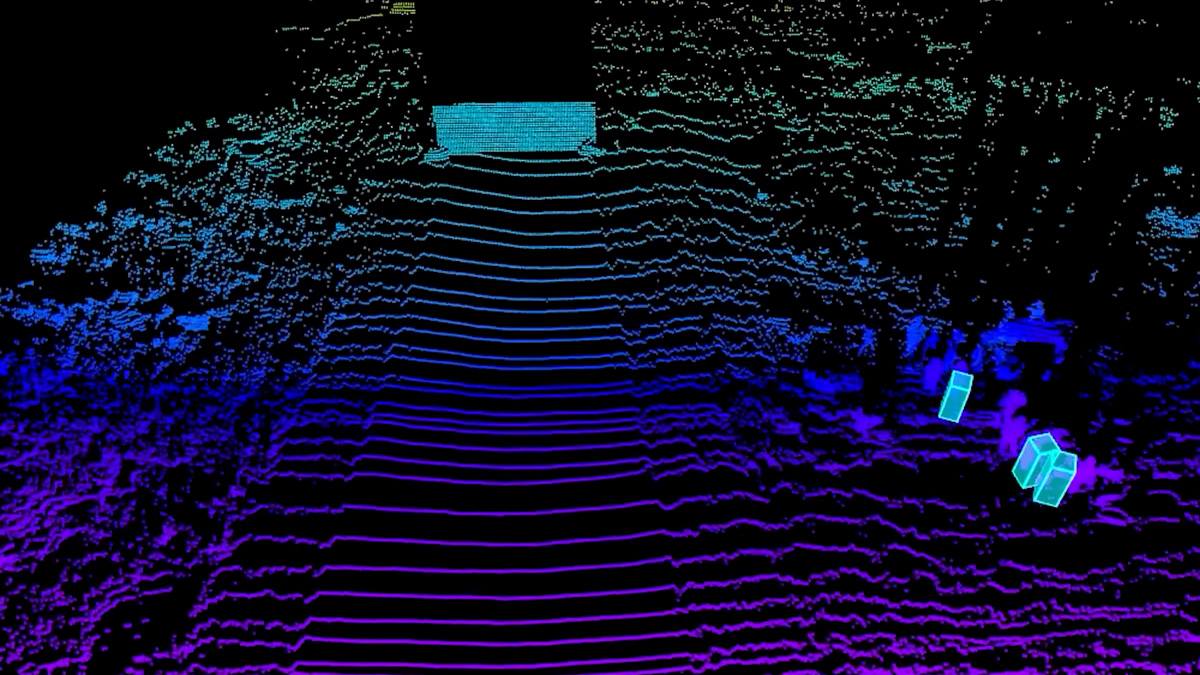
Waymo 等公司採用的技術路線強調多種感測器的協同運作,特別是 LiDAR(光達),可提供比純視覺更精準的 3D 環境建模能力。
技術特點
- LiDAR: 透過雷射測距建立高精度 3D 地圖,即使在黑暗或惡劣天氣下仍能精確感知環境。
- 雷達(Radar): 可探測遠距離物體與速度,對雨霧天氣具有較高抗干擾能力。
- 攝影機(Camera): 用於識別交通標誌、車道線、顏色等視覺資訊。
- 感測器融合: 同步整合不同感測器數據,以提升感知準確性與系統穩定性。
- 高精地圖(HD Maps): 輔助車輛定位,增強導航與決策能力。
優勢
✅ 更高的安全性: 多感測器提供冗餘,即使某個感測器失效,其他感測器仍能補足資訊,降低風險。
✅ 環境適應力強: LiDAR 和雷達在低光、惡劣天氣下仍能運作,不易受環境變化影響,確保穩定性。
✅ 高精度環境建模: LiDAR 提供 3D 點雲數據,使自駕車能更準確地辨識行人、車輛與障礙物,提高決策精度。
挑戰
⚠ 成本高昂: LiDAR、雷達等硬體價格昂貴,推高整車成本,不利於大規模普及。
⚠ 技術複雜度高: 多感測器數據須同步校正與融合,演算法開發難度較高。
⚠ 部署限制: 目前主要應用於無人計程車、物流運輸等特定場景。

這兩種方案在技術實現方式、成本考量與應用場景上各有優劣。特斯拉的純視覺方案成本較低,適合量產車輛的普及應用,但在惡劣天氣條件下的表現以及感測冗餘性方面面臨挑戰。Waymo 等公司的多感測器融合技術在安全性與環境適應性方面表現更佳,主要應用於無人計程車與物流車,但硬體成本較高。

測試 1:突然衝出的孩童
本次測試模擬住宅區、學校或商業區可能發生的突發狀況,讓孩童模型從停放車輛後方突然衝出,以考驗車輛自動緊急煞車(AEB)的反應能力。測試車輛以 40 mph(約 64 km/h)行駛,系統須在短時間內識別孩童並及時煞停,以避免碰撞。
搭載 LiDAR 的 Lexus SUV
- 以 40 mph(約 64 km/h)行駛時,成功在孩童模型前安全煞停。
- 透過 LiDAR 準確偵測障礙物並即時反應。
特斯拉 Autopilot
- 純視覺系統雖能識別孩童,但煞車反應較慢,無法完全避免碰撞。
- 切換至 Autopilot 模式後,表現有所改善,能即時煞停。
測試結果: 搭載 LiDAR 的車輛能迅速偵測孩童模型並及時煞停,而特斯拉的純視覺系統雖然最終識別孩童,但反應較慢,導致輕微碰撞。切換至 Autopilot 模式後,特斯拉的表現有所改善,能即時停下,但穩定性仍不及 LiDAR 車輛。

測試 2:濃霧環境下的偵測能力
測試透過人工製造濃霧,模擬低能見度環境(如山區大霧、霧霾或高濕度天候),評估車輛是否能持續辨識前方障礙物並適時反應。在濃霧條件下,攝影機視野可能受阻,導致 AI 無法準確解析影像。
搭載 LiDAR 的 Lexus SUV
- 不受濃霧影響,仍可偵測孩童模型並啟動煞車。
- 成功在安全距離內停下,未發生碰撞。
特斯拉 Autopilot
- 受濃霧影響,孩童模型在攝影機畫面中消失。
- 無煞車反應,直接撞上孩童模型。
測試結果: LiDAR 依然能準確偵測孩童模型並及時煞停,不受霧氣影響,而特斯拉的純視覺系統則因濃霧干擾,孩童模型在畫面中消失,導致車輛未產生任何煞車反應,直接撞上障礙物。

測試 3:大雨中的感知能力
測試透過高壓噴水裝置模擬暴雨環境,考驗車輛在極端天候下的感測能力。水流從車輛四周強力噴灑,以重現高速公路暴雨導致視線受阻的情境,並檢驗感測系統在雨水影響下是否能維持穩定的環境辨識能力。
搭載 LiDAR 的 Lexus SUV
- 在雨水干擾下仍能偵測孩童模型,但反應稍有延遲。
- 在最後一刻啟動煞車,避免撞擊。
特斯拉 Autopilot
- 開始下雨後,孩童模型在攝影機畫面中消失。
- 無煞車反應,直接撞擊孩童模型。
測試結果: 搭載 LiDAR 的車輛雖在大雨中偵測能力略有延遲,但仍能成功辨識孩童模型並即時煞停。特斯拉的純視覺系統則因雨水干擾攝影機視線,孩童模型在影像中消失,導致車輛無法識別障礙物,最終直接撞上孩童模型。

測試 4:迎面強光干擾
本次測試模擬日出、日落時的強烈逆光環境,或夜間迎面來車的強光干擾,評估車輛感測系統在極端光線變化下的穩定性。測試過程中,強光直射車輛攝影機,重現駕駛員在低角度陽光或強光燈照射下的視線受阻情境。
搭載 LiDAR 的 Lexus SUV
- 不受強光影響,順利辨識孩童模型並停車。
- 能見度與正常光線條件下無明顯差異。
特斯拉 Autopilot
- 成功辨識孩童並適時煞車。
- 在此測試中表現良好,與 LiDAR 車輛不相上下。
測試結果: LiDAR 不受光線影響,仍能順利辨識孩童模型並煞停,而特斯拉的攝影機系統雖受一定影響,但仍成功偵測孩童並適時煞停。在此測試中,純視覺技術與 LiDAR 表現接近,顯示視覺 AI 在強光環境下仍具備一定的可靠性。

測試 5:假牆 vs. Autopilot
此測試模擬經典卡通《樂一通》中 Wile E. Coyote(威利狼)遭 Road Runner(嗶嗶鳥)欺騙的場景,評估自動駕駛系統是否會受到視覺假象影響。測試團隊在道路上設置一面畫有道路與天空圖案的假牆,觀察車輛感測系統是否能正確辨識該牆為障礙物並及時煞停。

搭載 LiDAR 的 Lexus SUV
- LiDAR 偵測到牆面,順利煞停。
- 未受假影像影響。
特斯拉 Autopilot
- 無法判斷假牆為障礙物,直接撞上。
- 無任何煞車反應。
測試結果: 搭載 LiDAR 的車輛順利辨識假牆為障礙物並提前煞停,而特斯拉的純視覺系統未能判斷該牆為實體障礙物,直接撞上,且未產生任何煞車反應,顯示純視覺技術在特殊視覺欺騙環境下的侷限性。

自動駕駛技術挑戰與未來方向
從 Mark Rober 的測試結果來看,在惡劣天氣(如濃霧、大雨)及特殊視覺欺騙場景(如假牆)中,表現明顯不如搭載 LiDAR 的多感測器融合系統。不過需要注意的是,本次測試使用的是特斯拉的基本 Autopilot 系統,主要依賴傳統的規則驅動與簡單神經網路結合的技術。
然而,特斯拉目前已開始推動基於端到端神經網路的全自動駕駛(FSD)技術,透過更先進的 AI 模型,直接從攝影機的原始影像數據生成駕駛決策,逐步取代傳統的分模組化設計,如獨立的感知、規劃與控制模組。

這種方法依賴特斯拉車隊累積的數十億英里數據,並透過 Dojo 超級電腦進行訓練,採用類似 Transformer 的模型架構。其優勢在於提高靈活性,但仍面臨可解釋性不足及極端場景表現尚待驗證的挑戰。目前技術仍處於過渡階段,部分功能仍採用模組化設計。

端到端 FSD 技術利用特斯拉龐大的真實世界行駛數據進行訓練,理論上能更有效應對複雜場景,例如惡劣天氣或視覺欺騙環境。然而,在本次濃霧、大雨與假牆等極端場景測試中,純視覺方案是否能在更先進的 FSD 系統支持下顯著提升表現,仍需進一步驗證。

本次測試是否由 Luminar 直接出資尚未獲得明確證實,但現有線索顯示,該影片可能屬於隱性廣告,特別是考慮到 Luminar 過去五年股價下跌 96%,可能具有商業動機。然而,對於台灣車主而言,目前僅能使用基本的 Autopilot 功能,在面對濃霧、大雨等極端環境時,仍需特別留意。
延伸閱讀
特斯拉如何讓 FSD 更精準、更高效?專利揭密 AI 子網路與策略性任務分配
特斯拉 FSD 低能見度表現遭調查!惡劣天氣下通常比人類駕駛更可靠?
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY 與 Facebook 粉絲專頁,或將 electrify.tw 加入 Google 偏好來源,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。