特斯拉近日公開兩項美國專利申請,顯示 FSD 在「視覺化」方面可能迎來新突破。這些專利的核心在於運用 AI 技術,將攝影機拍攝的影像轉換成更高精度的 3D 空間地圖,讓系統能更準確掌握周遭環境細節。
本文主要內容
與現行 FSD 的視覺化相比,新技術不僅提升解析度,還能帶來更平滑真實的畫面,未來在低速與停車場景的表現值得關注。
專利技術與現有 FSD 視覺化的差異比較
目前特斯拉 FSD 的視覺化仍以簡化呈現為主,主要透過線條、區塊與物件符號描繪周遭環境,解析度有限,因此較適合高速道路駕駛。相較之下,最新專利技術強調高精度 3D 重建,能更細緻展現地面資訊,特別適用於停車場與低速場景。
| 比較面向 | 現有 FSD 視覺化 | 新專利技術 |
|---|---|---|
| 精細度 | 約 30 公分一格,方塊化呈現 | 細化至「次體素」等級,約 10 公分 |
| 呈現內容 | 車道線、車輛、行人、交通錐 | 增加地面標記與停車格 |
| 技術方法 | 傳統佔用網路,二元顯示有物體/無物體 | 簽署距離場(SDF),生成連續曲面與圖層堆疊 |
| 使用場景 | 高速與一般道路駕駛 | 停車場與低速場景 |
| 體驗效果 | 抽象化,近似遊戲的簡化模型 | 接近實景的 3D 重建,更直觀可讀 |
透過上述對比可以看出,新專利技術並非單純提升解析度,而是將 FSD 的視覺化推向「真實場景重建」,特別在停車與細節辨識上,有望帶來全新的使用體驗。

兩件專利申請展現純視覺方案潛力
特斯拉於 2025 年 9 月 11 日同時公開兩件專利申請,內容幾乎完全一致,主題都是以 AI 技術強化「純視覺」的高精度佔用網路,用於改善停車與地面標記辨識。這顯示特斯拉正透過成對申請案,全面布局從感知到停車輔助的技術保護。
專利的核心,是將多顆攝影機取得的影像交由 AI 模型處理,生成更精細的三維「佔用地圖」。這不僅能判斷空間中是否存在物體,更能將物體邊界描繪得平滑且準確。與現有系統相比,新技術能辨識更多元的地面標記,例如無障礙停車格或消防通道,而不只是基本的車道線。
發明人名單高度重疊,其中包含 Autopilot 負責人 Ashok Kumar Elluswamy 與多位核心工程師。雖然兩件專利在細節上略有不同,但可視為「姊妹案」,確保涵蓋範圍更完整,從 AI 演算法到互動式停車介面都納入保護。
技術細節展現高精度三維建模能力
這兩件專利不僅是影像處理方案,更展現特斯拉試圖將純視覺技術提升到「重建真實環境」的層級。以往 FSD 的畫面大多是線條與方塊化物件,僅能提供駕駛基本的環境理解,但在停車場或複雜場景中,往往缺乏足夠細節。這次的專利則針對這些痛點提出解法,讓系統能在狹窄空間中準確辨識地面符號與物體邊界。
專利內容描述了幾項關鍵功能:
- 次體素精度:將原本約 33 公分一格的地圖精細化至約 10 公分,使邊界呈現更平滑真實。
- 時空融合:結合連續影像,整合行人與車輛等動態物體的資訊,讓模型輸出更穩定。
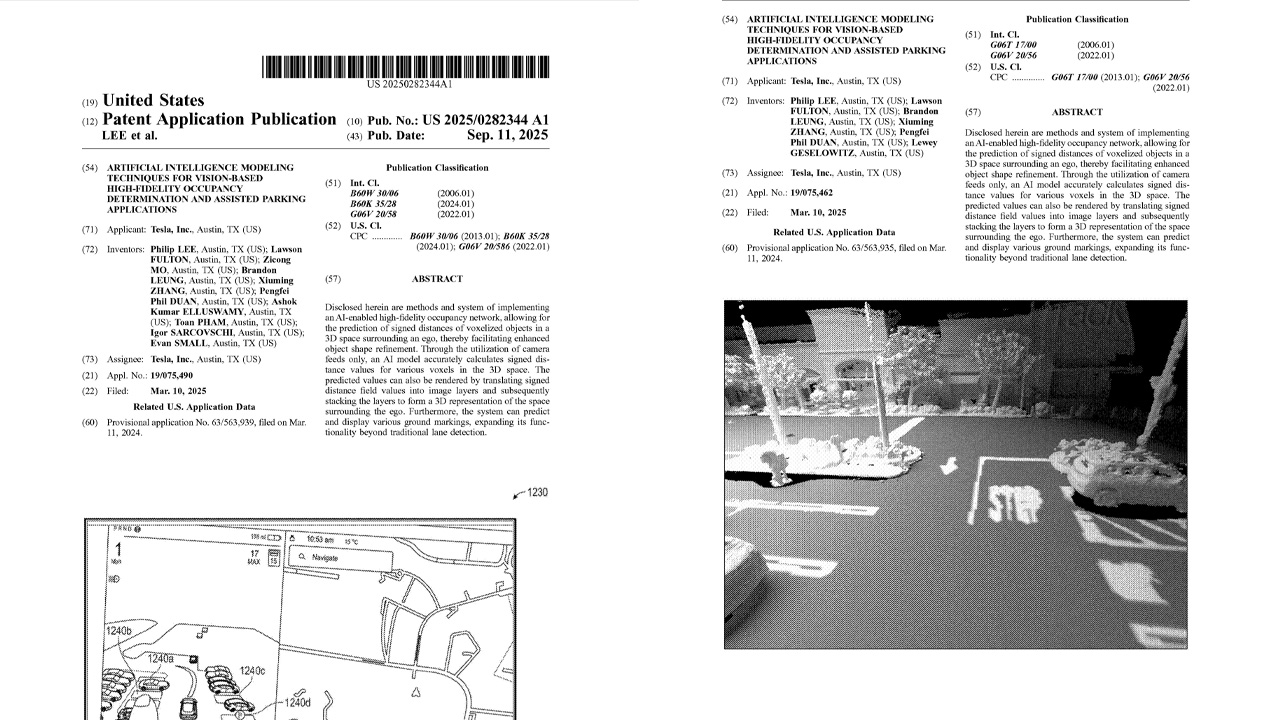
- 可視化呈現:AI 將分析數據轉換成多層影像,再堆疊成 3D 圖像,方便駕駛在停車時快速理解環境。
- 互動介面:專利提及未來可能出現「候選停車位」提示,協助駕駛挑選合適車格。

專利應用展望凸顯特斯拉研發方向
這兩件專利的核心意義,在於特斯拉試圖透過純視覺方案,解決以往佔用網路在停車場或狹窄環境中「細節不足」的問題。若技術成功落地,未來車主在停車時,FSD 不僅能辨識車道線,還能讀取地面文字與圖案,甚至提供停車位建議,讓停車過程更精準也更直覺。
這項技術同時也顯示特斯拉正把抽象化的格狀呈現,逐步推進至更接近實景的 3D 視覺化。未來除了停車場,地下車庫、施工路段或標線複雜的路口,也有望受惠於更高精度的環境重建。

不過,目前這仍屬於「專利申請公開」,尚未正式核准,也不代表技術已完成或即將上線。能否真正應用,仍取決於運算晶片(如 Dojo、AI5/AI6)的效能,以及 FSD v14 之後的研發進度。與依賴 LiDAR 與高精地圖的競爭對手相比,特斯拉選擇的純視覺路線挑戰更高,但若能實現,將更有利於大規模普及並降低成本。
延伸閱讀
不再需要人工貼標?特斯拉專利 AI 自動標註技術提升 FSD 訓練效率
特斯拉如何讓 FSD 更精準、更高效?專利揭密 AI 子網路與任務分配
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY 與 Facebook 粉絲專頁,或將 electrify.tw 加入 Google 偏好來源,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。