特斯拉執行長 Elon Musk 日前再度針對自動駕駛感測器選擇發表看法,直言 LiDAR 與雷達在惡劣天候表現不佳,甚至可能因訊號衝突降低整體安全性。他強調,特斯拉採用「camera-only」純視覺方案,是為了避免感測資料矛盾帶來的風險,並認為純視覺路線才是邁向安全自駕的最佳解方。
本文主要內容
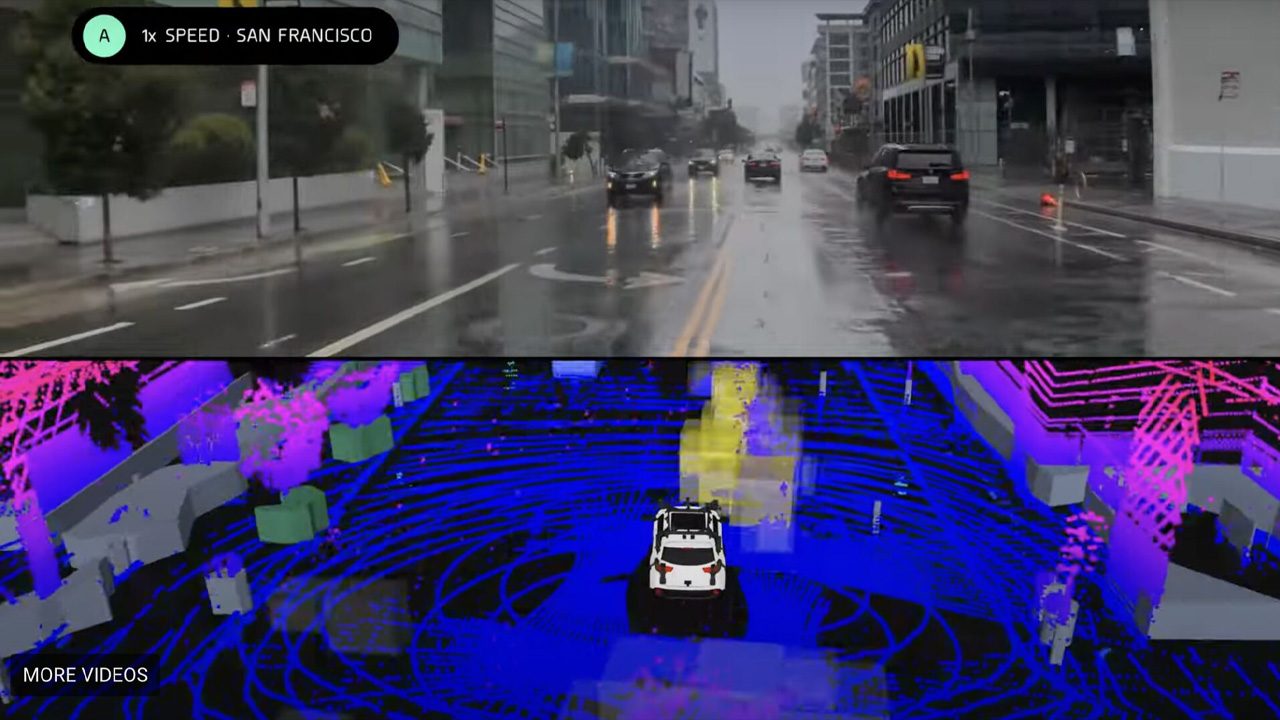
另一方面,Waymo 等競爭對手則持續採用 LiDAR、毫米波雷達與攝影機融合的感測技術,主張此布局能提供更完整的環境感知與冗餘保護。兩派技術理念差異鮮明,凸顯自動駕駛產業在安全性、成本與實用性上的不同取捨。
特斯拉自 2021 起移除雷達改採純視覺系統
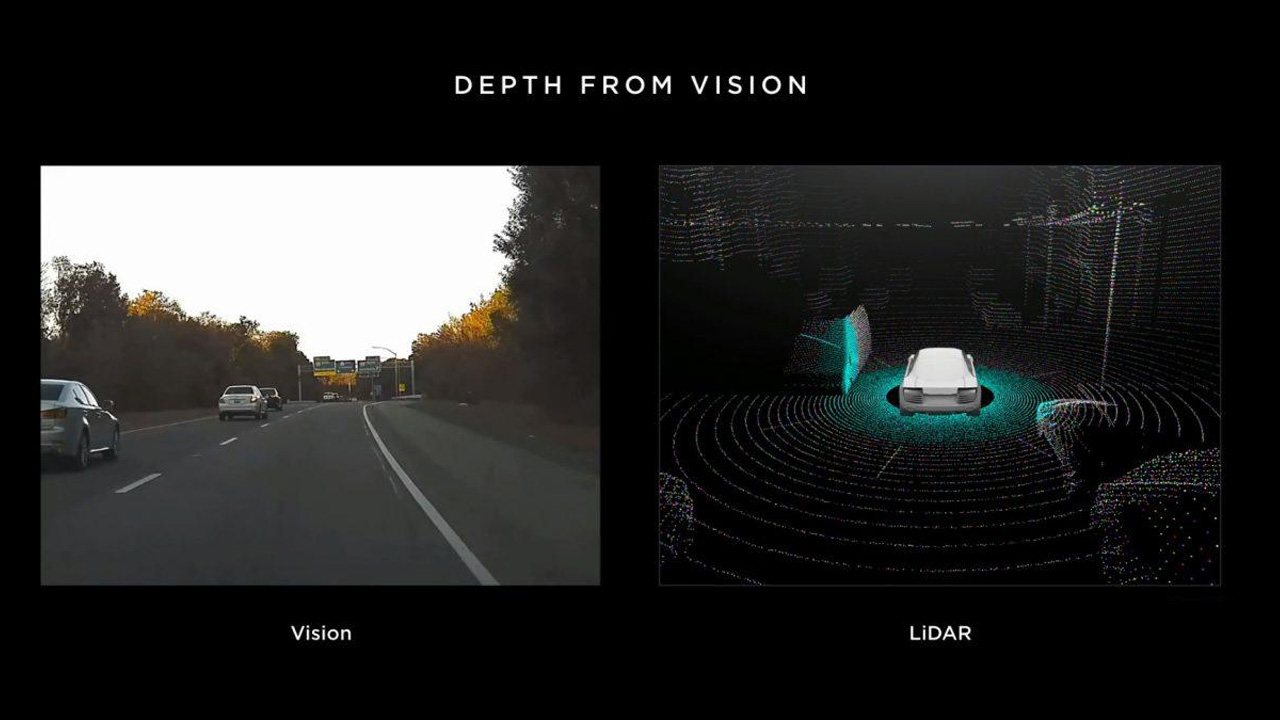
自 2021 年起,特斯拉逐步移除新車中的毫米波雷達與超音波感測器,全面轉向自家開發的「Tesla Vision」純視覺系統。Elon Musk 表示,早期經驗顯示毫米波雷達資訊經常與攝影機資料矛盾,導致系統判斷模糊,因此選擇只保留攝影機作為唯一感測來源,反而讓整體表現更穩定。

他曾在社群平台指出,LiDAR 與毫米波雷達會因感測器衝突而降低安全性;如果與攝影機資訊不一致,系統將無法判斷該依賴哪一方,這種不確定性反而會提升風險。
根據特斯拉官方公告,自 2022 年起 Model S 與 Model X 新車已全面取消毫米波雷達,而部分早期配備毫米波雷達的車輛,在後續進廠維修時也被主動停用相關模組。
LiDAR 在惡劣天候表現受限可靠性不足
Elon Musk 進一步批評 LiDAR 技術在雨、雪與沙塵暴等環境下,會因反射與散射效應(reflection scatter)而降低準確度。他表示:「Waymo 在任何強降雨下都無法正常運作」,並強調這是 LiDAR 的先天限制之一。
來自英國華威大學製造集群(WMG, University of Warwick)的研究《Heavy rain affects object detection by autonomous vehicle LiDAR sensors》,透過 WMG 3xD 模擬器進行測試,發現當降雨量達每小時 50 mm 時,LiDAR 在近距離會產生大量誤偵測,中遠距離偵測能力亦明顯衰退,可靠性大幅下降。研究結論指出,雨勢愈大、距離愈遠,偵測品質愈低,因此建議系統應搭配多感測器融合,以因應惡劣天候條件。
另一項由韓國交通大學(Korea National University of Transportation)W. Y. Pao 等人發表於《Sensors》期刊的研究《Impact of Raindrops on LiDAR Sensor Coverings for Autonomous Vehicles》則指出,若 LiDAR 裝置外部罩面採用非疏水性材質,雨滴容易附著並造成光束偏折與訊號衰減,進而導致回波點雲遺漏與準確度下降。研究建議選用具備疏水或超疏水性的材質,並搭配排水設計,有助提升 LiDAR 在惡劣天候下的穩定性與精確性。

值得注意的是,Elon Musk 曾參與 SpaceX 的 Dragon 太空艙對接任務,該系統便使用 LiDAR 協助與太空站進行精密定位。他指出,自己並非完全否定 LiDAR,而是認為其並不適合應用於大規模實用的自動駕駛車輛。
Waymo 與 Uber 採多感測融合提升安全性
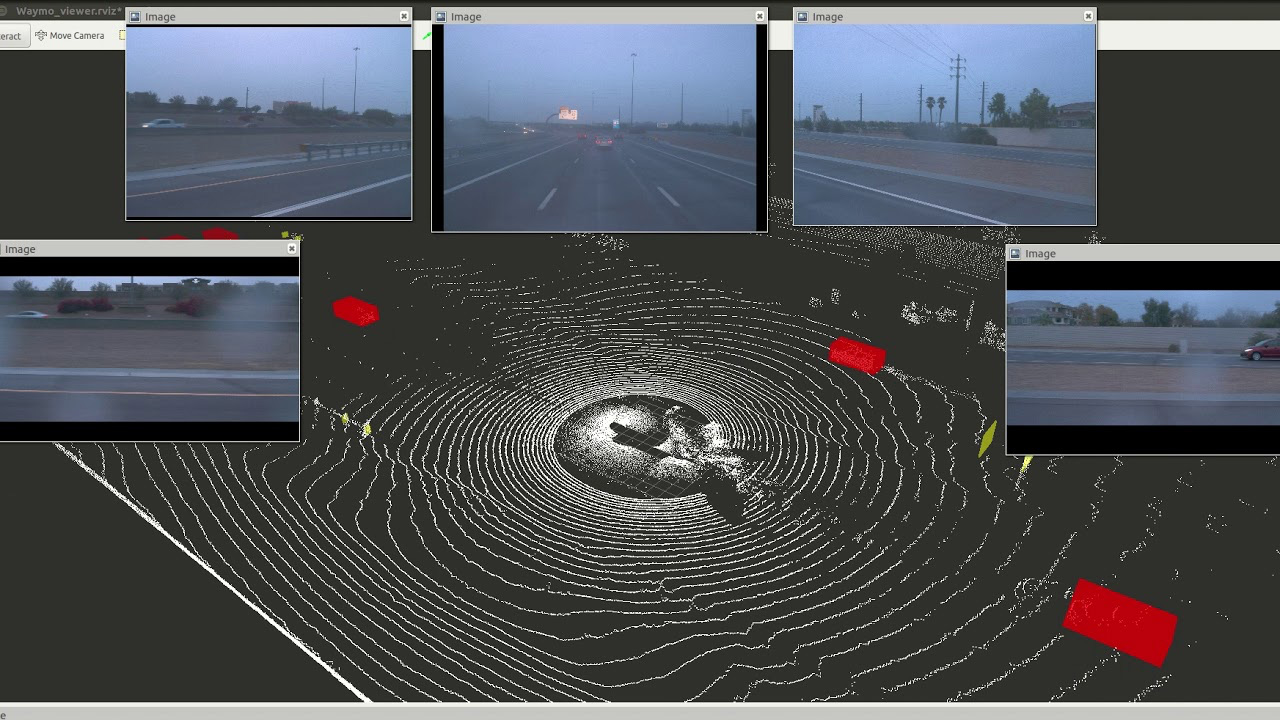
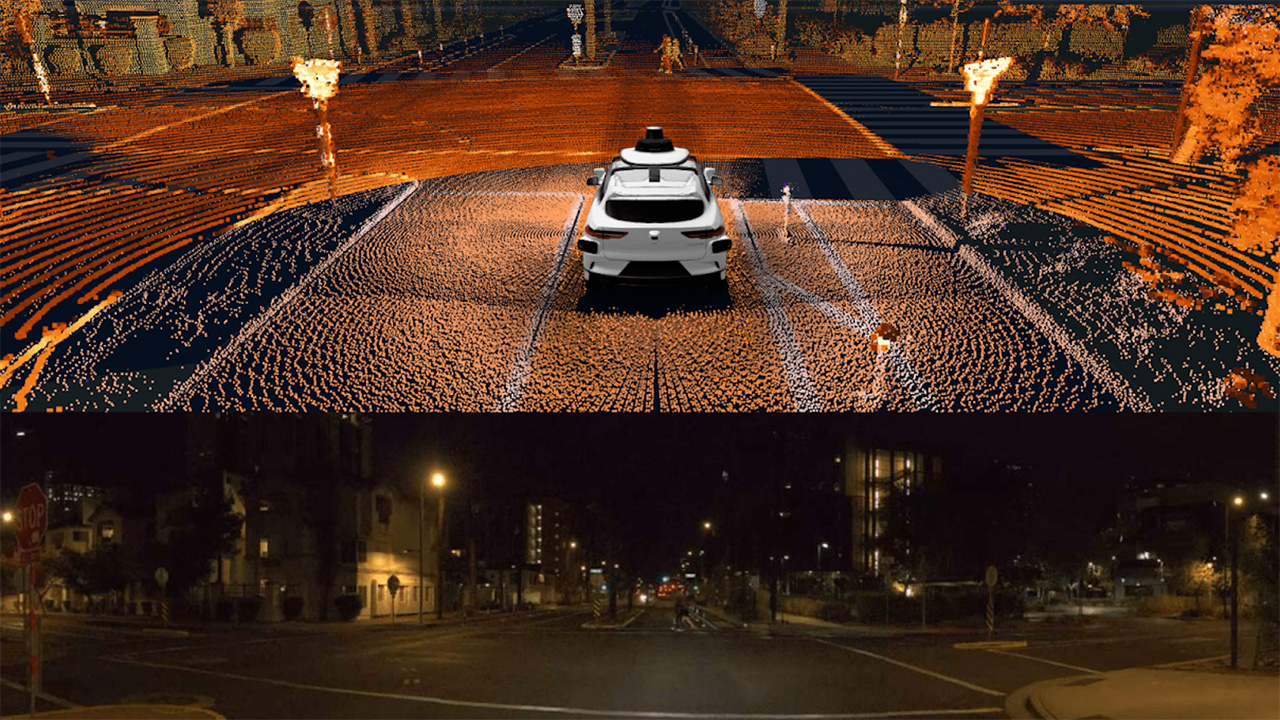
與特斯拉走純視覺路線不同,Waymo 與 Uber 等自駕技術供應商皆採用搭載 LiDAR、毫米波雷達與攝影機的多重感測系統。Waymo 認為,透過感測器融合能提供完整的三維環境資訊與物件分類能力,並在低光、夜間及複雜路況中維持穩定性。
Uber 執行長 Dara Khosrowshahi 也指出,固態 LiDAR 單價約 500 美元,因此「為何不一併納入 LiDAR?我們所有的合作夥伴都使用攝影機、毫米波雷達與 LiDAR 的組合,我個人認為這是正確的解方,但或許未來會被證明是錯的。」他強調,目前產業多傾向多感測器佈局,以確保更高的可靠性。
Waymo 依賴高精地圖特斯拉強調通用自駕策略
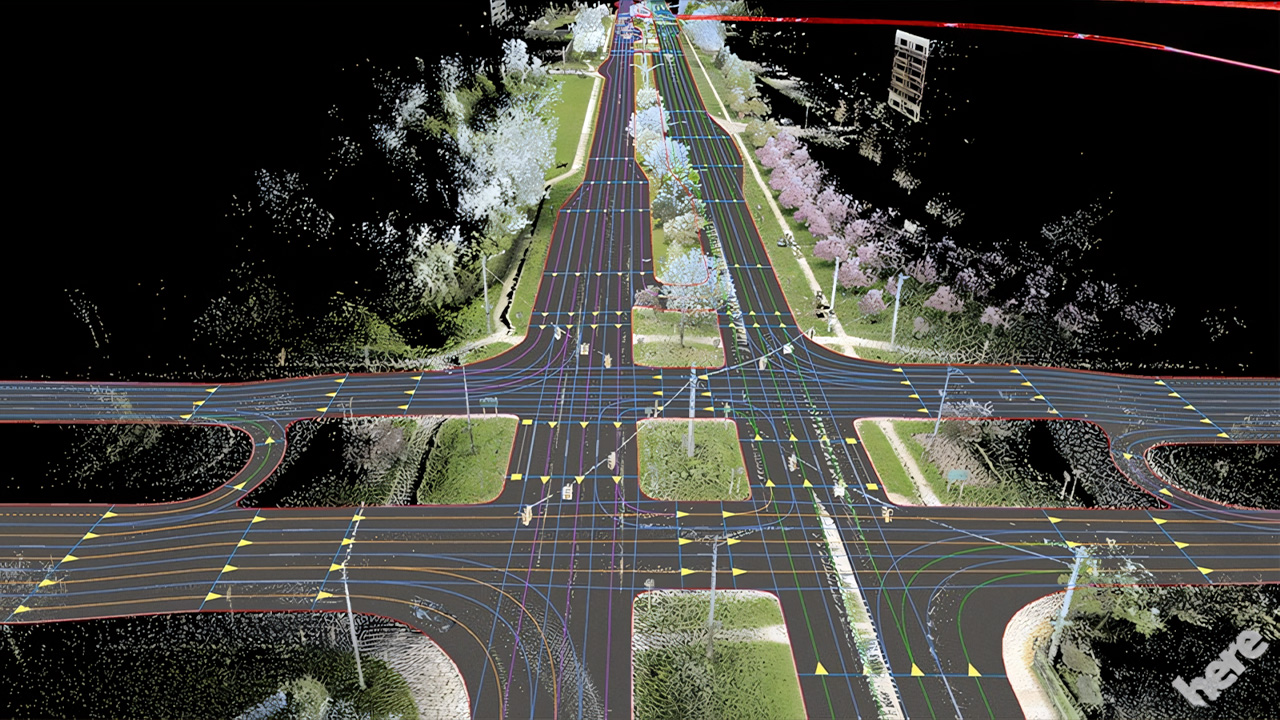
Waymo 採用依賴高精地圖(HD Map)的運行方式,目前主要部署於鳳凰城與舊金山等特定區域。此方法雖具高度精確性,但在拓展彈性上受到限制。Elon Musk 多次批評,這類方案難以應對動態環境變化,無法擴展至全球道路系統。
特斯拉則採取「即時感知+視覺推理」策略,不依賴外部地圖資料,讓車輛透過自身 AI 模型理解周遭環境,主打通用性與可擴展性。
特斯拉與多感測器自駕方案優劣全面對比
不同自駕技術供應商在感測器配置上採取迥異策略,這不僅影響系統架構,也牽動成本、安全性與可擴展性的取捨。以下透過對比整理,可以清楚看出特斯拉與多感測器陣營在理念與實務上的分歧:
| 感知方案 | Tesla Vision | LiDAR 融合系統 |
|---|---|---|
| 感測策略 | 攝影機搭配 AI 模型進行即時環境理解 | LiDAR、毫米波雷達與攝影機融合,提供多重感知輸入 |
| 技術理念 | 單一來源簡化架構、成本低、利於全球部署 | 感測器互補提升穩定性,適用夜間與惡劣天候環境 |
| 系統決策穩定性 | 感測器越少越安全,避免衝突導致決策模糊 | 多重感測器能提供冗餘保護,降低單點故障風險 |
| Elon Musk 的公開評價 | 認為感測資料矛盾會增加風險,攝影機足以涵蓋所有場景 | 批評 LiDAR 在強降雨、沙塵暴等環境下表現受限 |
| 是否依賴高精地圖 | 否,完全依賴即時視覺輸入與 AI 推論 | 是,運作依賴高精地圖,部署範圍受限 |
| 硬體搭載狀況(截至 2025) | HW3 起取消毫米波雷達,HW4 雖保留硬體但尚未啟用 | 多數自駕車商標配備 LiDAR 與毫米波雷達,並已實際啟用 |
Elon Musk 認為,多感測器雖具備冗餘優勢,但若缺乏有效的融合機制,容易導致「sensor ambiguity」——系統無法判斷該信任哪個感測來源,進而帶來潛在的安全隱憂。反觀多感測器支持者則認為,冗餘正是提高安全性與可靠性的關鍵。

HW4 預留毫米波雷達功能但仍未實際啟用
儘管特斯拉自 2021 年起全面推行純視覺策略,但在 2023 年推出的 Hardware 4(HW4)硬體版本中,仍預留毫米波雷達模組。根據拆解資料,HW4 採用 Continental ARS410 高解析度前向雷達,實際配置於新款 Model S、Model X 與 Cybertruck 車型。

不過截至目前,特斯拉尚未透過軟體啟用該毫米波雷達功能。HW4 的 Autopilot 與 FSD 系統依舊以攝影機作為主要輸入來源,尚未出現感測器融合的應用。Elon Musk 也未對啟用雷達表態,顯示該模組仍是備而不用的預留設計。
延伸閱讀
路上遇到自駕車可以拍嗎?為何高功率 LiDAR 會損壞手機相機 CMOS 感測器
威利狼能騙過特斯拉純視覺嗎?實測 Autopilot 能否看穿濃霧、大雨與假牆
從 Face ID 到自駕車!特斯拉 Cybercab 傳導入結構光強化邊緣場景偵測
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY、Google 新聞 與 Facebook 粉絲專頁,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。