Waymo 近期公開 Waymo World Model,將大型生成式世界模型正式導入自動駕駛模擬流程,並明確定位為實際研發與安全驗證工具。這項技術並非展示性研究,而是直接服務於 Waymo Driver 的訓練與上線前測試。
本文主要內容
在 Waymo Driver 已累積近 2 億英里全自動行駛里程的背景下,官方同步說明,真正支撐系統成熟度的關鍵並不只來自實車數據,而是規模遠高於實際道路的虛擬模擬測試。Waymo World Model 正是用來補足真實道路幾乎無法涵蓋的極端與罕見情境。
世界模型改變自動駕駛模擬的本質
Waymo World Model 的核心意義,在於模擬方式本身的轉變,而非單純提升畫面擬真度。傳統自動駕駛模擬多依賴人工建模、規則腳本與既有案例重播,場景來源有限,測試範圍受制於已知事件。

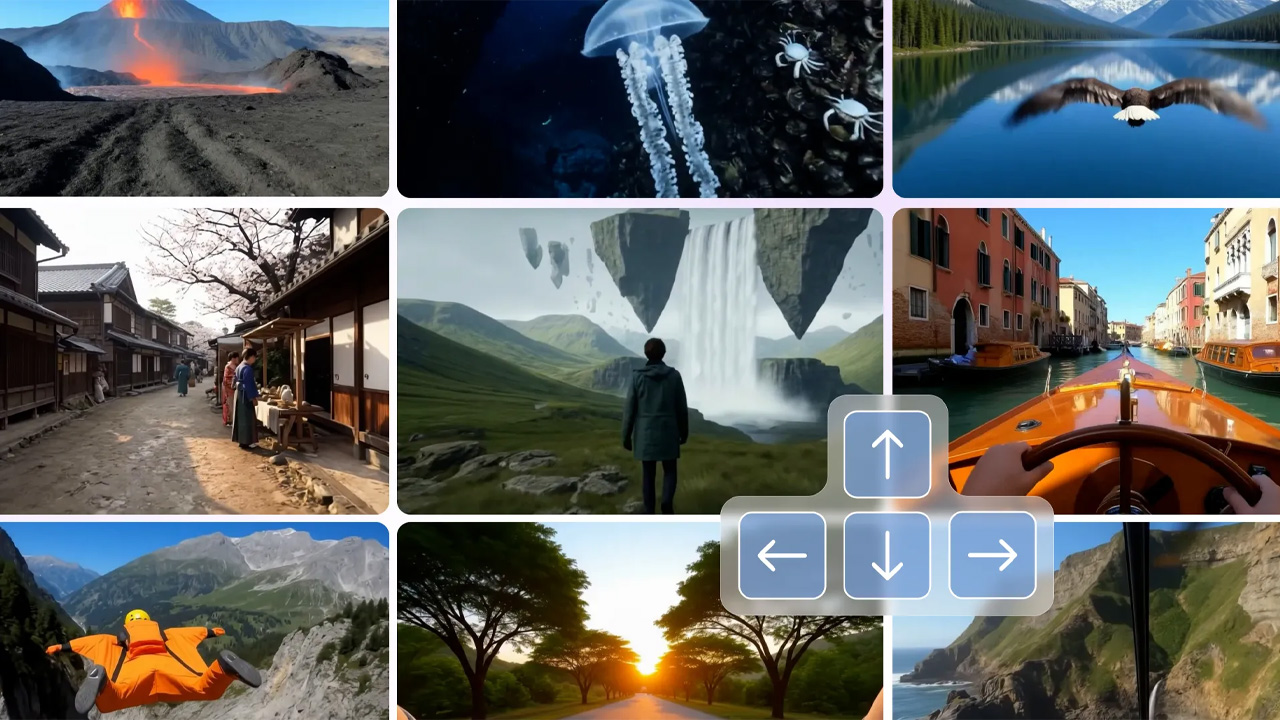
世界模型則改以生成式方式建立連續且可演化的虛擬世界,場景能依上下文自然延伸,產生合理但未曾發生過的交通狀況。官方資料指出,Waymo Driver 在實際上路前,已於虛擬世界中行駛數十億英里的模擬里程,用以提前驗證系統在各種條件下的行為表現。
生成式技術清楚區隔於實際上路系統
Waymo World Model 建立在 Google DeepMind 的 Genie 3 世界模型技術之上,但官方刻意劃清研究模型與實際自動駕駛系統之間的界線。Genie 3 提供的是通用世界建模能力,負責生成連續且具一致性的虛擬環境。
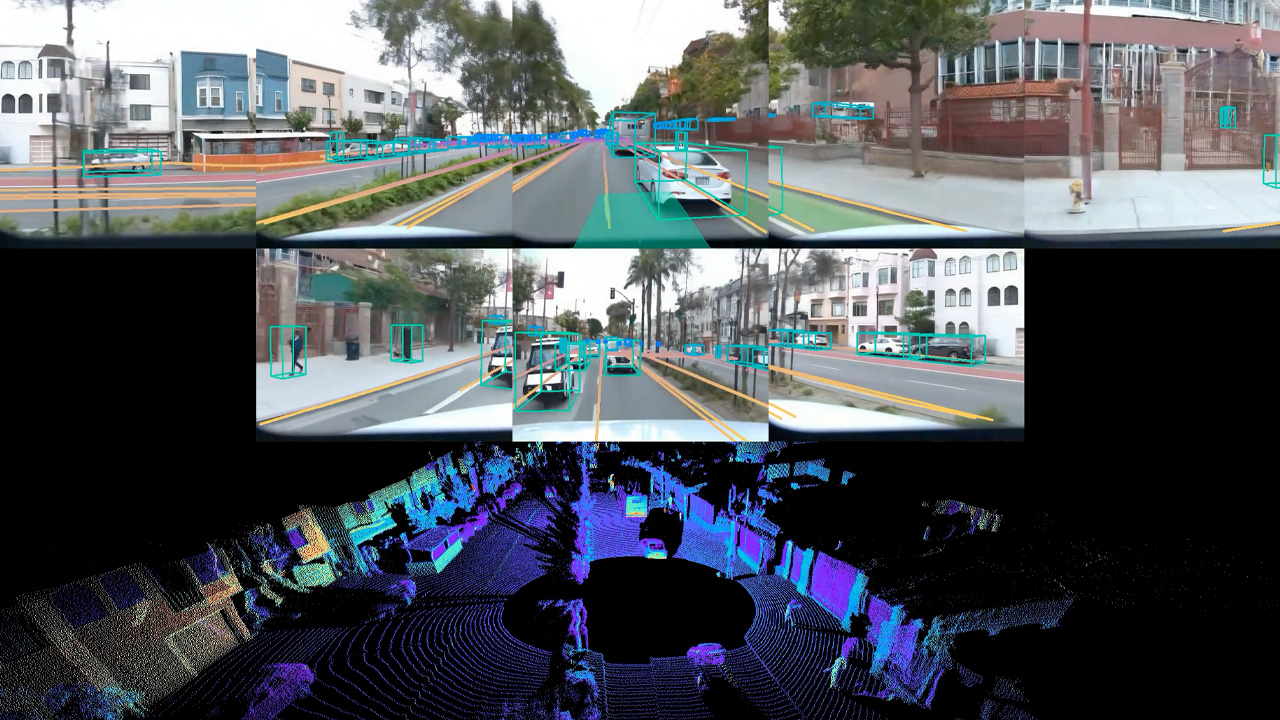
Waymo 則透過後訓練方式,針對駕駛領域進行專門調整,使模型能產生與實際感測器相容的輸出資料,包括符合車輛使用條件的 LiDAR 深度資訊。官方也明確指出,生成式模型並未直接部署於車輛上,而是用於模擬與驗證流程,確保測試結果具備可控性與可重複性。
多模態與可控模擬支援工程流程
Waymo World Model 之所以被定位為實用工具,關鍵在於其輸出與控制能力能直接對接工程需求。模擬系統可同步產生高擬真的 3D 相機畫面,以及與 Waymo 實際車輛相容的 LiDAR 深度資料,使感知、預測與規劃模組能在虛擬環境中進行完整驗證。
在操作層面,工程團隊可指定駕駛輸入,測試不同轉向、煞車或加速選擇下的系統反應,同時也能調整道路配置、號誌狀態與交通密度。透過語言指令快速變更天氣、時間與場景設定,大量測試案例得以迅速建立,進一步降低模擬建置成本。
長尾情境成為世界模型的核心用途
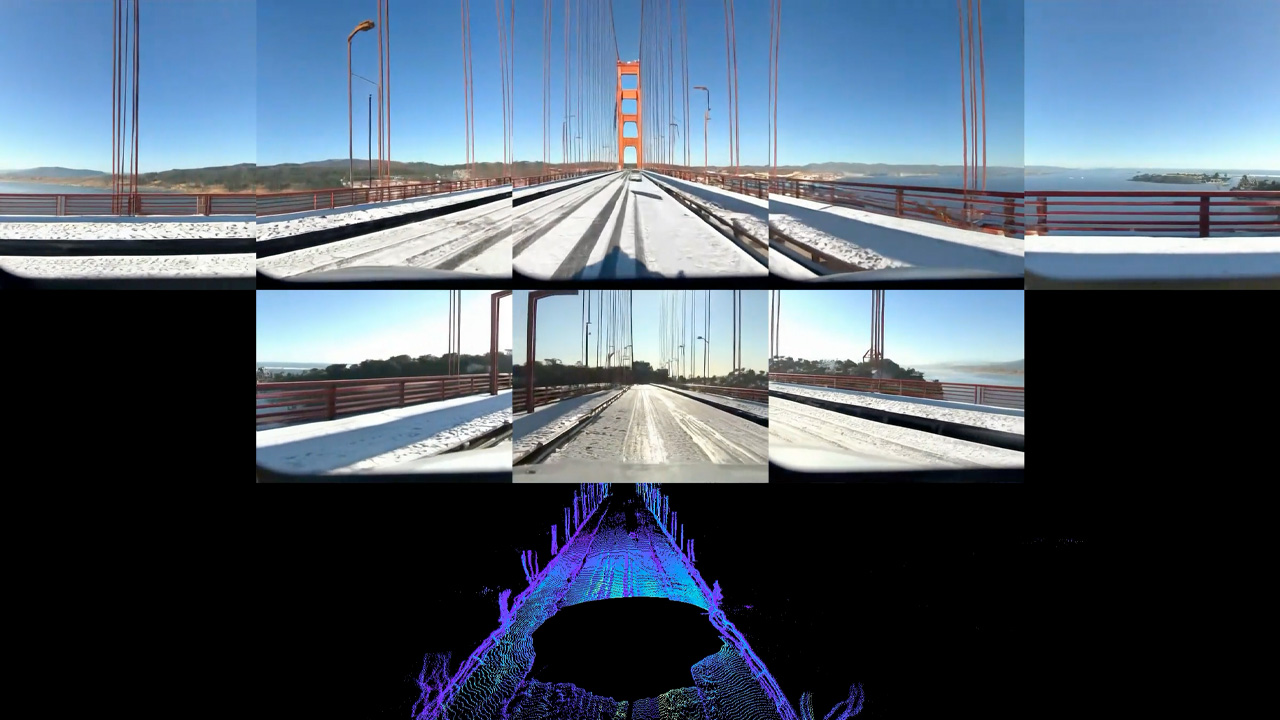
Waymo World Model 主要用來模擬所謂的長尾情境,也就是在真實道路中極少出現、幾乎不可能大量蒐集的罕見事件。官方在部落格與示範影片中,已明確展示多種具代表性的極端案例,用以驗證系統在低機率高風險狀況下的反應能力。

官方示範與描述中出現的長尾情境,包含以下幾類:
- 極端天氣與自然災害情境
- 龍捲風在高速公路旁移動,對行車造成直接威脅
- 金門大橋覆蓋輕雪,模擬非典型天候下的道路狀態
- 熱帶城市街道異常下雪,打破地理與氣候常態
- 洪水淹沒住宅死胡同或道路,影響通行與判斷
- 道路發生火災,車輛需從火場附近安全通過
- 罕見或異常動物與物件出現
- 道路上出現大象或德州長角牛等大型動物
- 城市環境中遇到獅子等非典型野生動物
- 行人穿著暴龍裝出現在斑馬線
- 車輛大小的風滾草橫越道路
- 其他異常交通狀況
- 故障卡車逆向停在道路中央,阻斷正常行車路線
官方特別指出,這類情境是真實車隊幾乎從未直接觀察到的案例,必須仰賴世界模型結合廣泛世界知識,以生成方式自然出現。這讓 Waymo Driver 能在虛擬環境中反覆練習近乎不可能發生的狀況,確保安全驗證的完整性。
世界模型支撐無人計程車服務擴張
Waymo World Model 同時扮演支援無人計程車服務擴張的角色。在新城市上線前,團隊可透過世界模型模擬當地交通行為與道路特性,提前驗證系統對陌生環境的適應能力,降低初期部署風險。

從官方定位來看,世界模型已被納入自動駕駛開發流程中的核心基礎設施之一。大型生成式模型正正式進入安全驗證與工程體系,成為 Waymo 推進無人計程車服務與規模化部署的重要支柱。
延伸閱讀
Waymo 自駕車撞死「貓市長」犯眾怒!FSD 遇到小動物會怎麼反應?
Waymo 累積 9600 萬英里無人駕駛里程!事故率顯著低於人類駕駛
若近期有購車規劃,可以使用 electrify.tw 的推薦連結 前往特斯拉官網訂購,或將推薦碼連結提供給銷售顧問即可獲得 NT$ 8,000 購車優惠。若您即將交付新車,不妨參考 JOWUA 周邊配件。
若覺得本站內容實用,歡迎追蹤 LINE TODAY 與 Facebook 粉絲專頁,或將 electrify.tw 加入 Google 偏好來源,日後查找用車資訊更方便。若有任何問題或建議,歡迎加入我們的 LINE 官方帳號 聯繫。